|
|
< Day Day Up > |
|
By relaxing the edges of a weighted dag (directed acyclic graph) G = (V, E) according to a topological sort of its vertices, we can compute shortest paths from a single source in Θ(V + E) time. Shortest paths are always well defined in a dag, since even if there are negative-weight edges, no negative-weight cycles can exist.
The algorithm starts by topologically sorting the dag (see Section 22.4) to impose a linear ordering on the vertices. If there is a path from vertex u to vertex v, then u precedes v in the topological sort. We make just one pass over the vertices in the topologically sorted order. As we process each vertex, we relax each edge that leaves the vertex.
DAG-SHORTEST-PATHS(G, w, s)
1 topologically sort the vertices of G
2 INITIALIZE-SINGLE-SOURCE(G, s)
3 for each vertex u, taken in topologically sorted order
4 do for each vertex v ∈ Adj[u]
5 do RELAX(u, v, w)
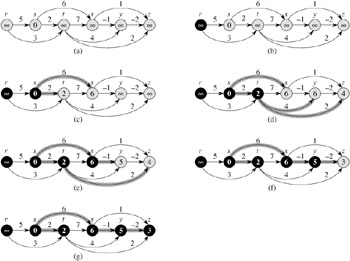
Figure 24.5 shows the execution of this algorithm.
The running time of this algorithm is easy to analyze. As shown in Section 22.4, the topological sort of line 1 can be performed in Θ(V + E) time. The call of INITIALIZE-SINGLE-SOURCE in line 2 takes Θ(V) time. There is one iteration per vertex in the for loop of lines 3-5. For each vertex, the edges that leave the vertex are each examined exactly once. Thus, there are a total of |E| iterations of the inner for loop of lines 4-5. (We have used an aggregate analysis here.) Because each iteration of the inner for loop takes Θ(1) time, the total running time is Θ(V + E), which is linear in the size of an adjacency-list representation of the graph.
The following theorem shows that the DAG-SHORTEST-PATHS procedure correctly computes the shortest paths.
If a weighted, directed graph G = (V, E) has source vertex s and no cycles, then at the termination of the DAG-SHORTEST-PATHS procedure, d[v] = δ(s, v) for all vertices v ∈ V, and the predecessor subgraph Gπ is a shortest-paths tree.
Proof We first show that d[v] = δ(s, v) for all vertices v ∈ V at termination. If v is not reachable from s, then d[v] = δ(s, v) = ∞ by the no-path property. Now, suppose that v is reachable from s, so that there is a shortest path p = 〈v0, v1,..., vk〉, where v0 = s and vk = v. Because we process the vertices in topologically sorted order, the edges on p are relaxed in the order (v0, v1), (v1, v2),..., (vk-1, vk). The path-relaxation property implies that d[vi] = δ(s, vi) at termination for i = 0, 1,..., k. Finally, by the predecessor-subgraph property, Gπ is a shortest-paths tree.
An interesting application of this algorithm arises in determining critical paths in PERT chart[2] analysis. Edges represent jobs to be performed, and edge weights represent the times required to perform particular jobs. If edge (u, v) enters vertex v and edge (v, x) leaves v, then job (u, v) must be performed prior to job (v, x). A path through this dag represents a sequence of jobs that must be performed in a particular order. A critical path is a longest path through the dag, corresponding to the longest time to perform an ordered sequence of jobs. The weight of a critical path is a lower bound on the total time to perform all the jobs. We can find a critical path by either
negating the edge weights and running DAG-SHORTEST-PATHS, or
running DAG-SHORTEST-PATHS, with the modification that we replace "∞" by "-∞" in line 2 of INITIALIZE-SINGLE-SOURCE and ">" by "<" in the RELAX procedure.
Suppose we change line 3 of DAG-SHORTEST-PATHS to read
3 for the first |V| - 1 vertices, taken in topologically sorted order
Show that the procedure would remain correct.
The PERT chart formulation given above is somewhat unnatural. It would be more natural for vertices to represent jobs and edges to represent sequencing constraints; that is, edge (u, v) would indicate that job u must be performed before job v. Weights would then be assigned to vertices, not edges. Modify the DAG-SHORTEST-PATHS procedure so that it finds a longest path in a directed acyclic graph with weighted vertices in linear time.
Give an efficient algorithm to count the total number of paths in a directed acyclic graph. Analyze your algorithm.
[2]"PERT" is an acronym for "program evaluation and review technique."
|
|
< Day Day Up > |
|